I’m having trouble with stereo rectification, where I want to keep the left camera center stationary and only warp the right image. I’m not sure if there is something I’m missing with the math but I feel like the y and z translation is not being included with my current implementation.
Currently the pipeline I have goes like this:
- Take images of the checkerboard with left and right camera
- Perform monocular calibration on both left and right camera with the CALIB_FIX_PRINCIPAL_POINT setting
- left camera reprojection error is 0.46 pixels
- right camera reprojection error is 0.41 pixels
- Perform stereo calibration with the setting CALIB_FIX_INTRINSIC
- reprojection error is 0.52 pixels
- Stereo Rectify with some of my own code
- reprojection error is about 6.5 pixels
The issue is that if I directly use stereoRectify, the reprojection error is about 0.5 pixels which is great. I call it as normal and here is an example image as output:
r1, r2, p1, p2, _, _, _ = cv2.stereoRectify(
left_camera_matrix,
left_dist_coeffs,
right_camera_matrix,
right_dist_coeffs,
dimensions,
stereo_rotation,
stereo_translation,
flags=cv2.CALIB_ZERO_DISPARITY,
alpha=-1,
)
EDIT: It seems like as a new user I can only embed one image per post. This image would have shown that if I allow stereoRectify to warp both images as usual, there is low reprojection error but a huge shift in the center of the left image.
The green and red crosshair that don’t correspond to a checkerboard point shows the shift in the center of the image.
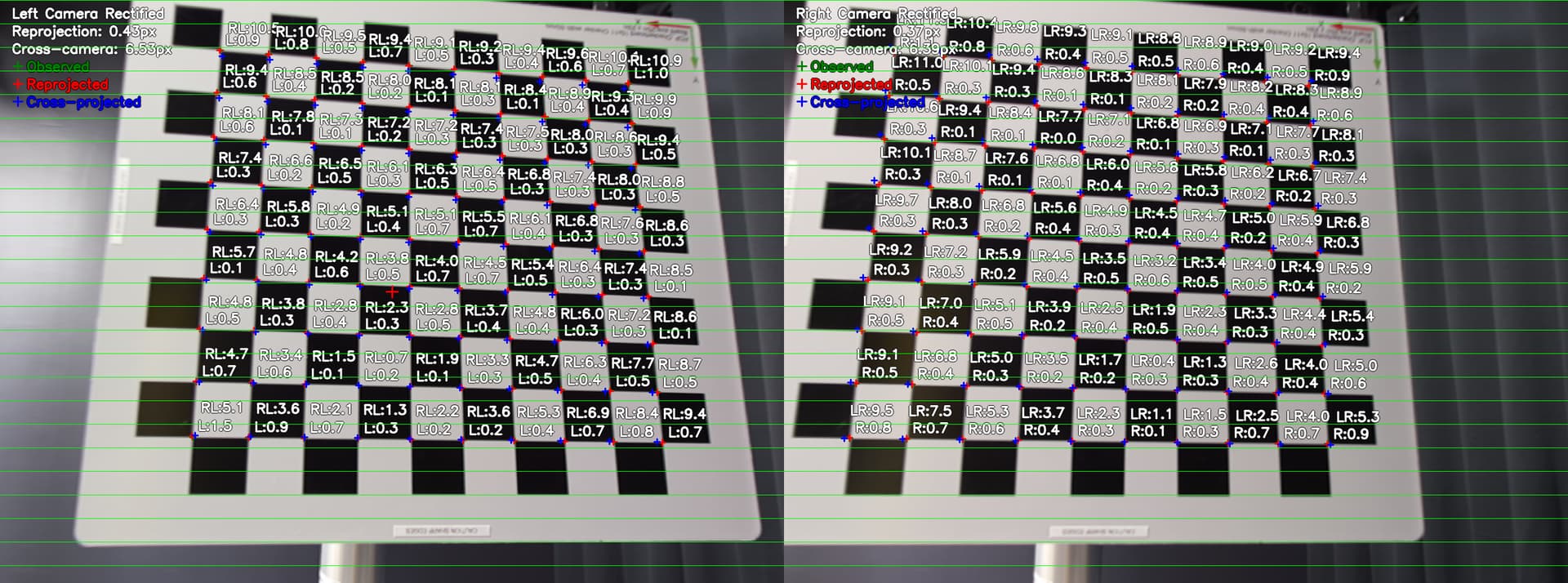
The issue is that I need to have the left camera rectified to its own image plane. I can only modify the right image. Here is another code snippet and image output:
_, _, _, p2, _, _, _ = cv2.stereoRectify(
left_camera_matrix,
left_dist_coeffs,
right_camera_matrix,
right_dist_coeffs,
dimensions,
stereo_rotation,
stereo_translation,
flags=cv2.CALIB_ZERO_DISPARITY,
alpha=-1,
)
# Left camera stays completely unchanged
r1_identity = np.eye(3)
p1 = left_camera_matrix.copy()
p1 = np.column_stack((p1, np.zeros((3, 1))))
# Apply rotation to right camera
r2_custom = stereo_rotation.T
# Create P2 with same intrinsics as right camera, but add translation for baseline
P2_custom = right_camera_matrix.copy()
P2_custom = np.column_stack((P2_custom, np.zeros((3, 1))))
baseline_pixels = abs(p2[0, 3])
P2_custom[0, 3] = -baseline_pixels
Is this something that is possible with the method that I’m using or is there something wrong with how I’m using these functions?