I am trying to get the year on a quarter. So for step 1, I’m trying to take an image of a coin and “straighten” it.
I found this video on how to detect image features to align an image. It works in some cases like this one.
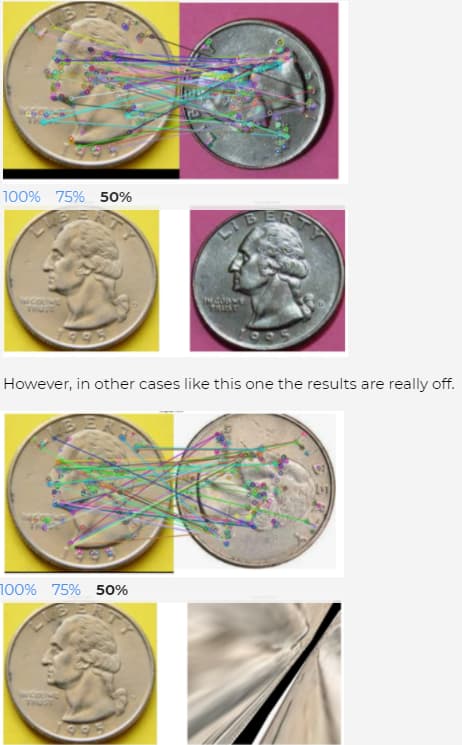
Any ideas on what I can do here to properly align the images?
My Jupyter code and images can be found on the link below.
https://drive.google.com/drive/folders/1lcTuaKrxEGU1y03tgjDwhQobsjt-F8wO?usp=sharing
Added code:
from __future__ import print_function
import cv2
import numpy as np
import matplotlib.pyplot as plt
# Read reference image
refFilename = "Quarter_A.png"
print("Reading reference image : ", refFilename)
im1 = cv2.imread(refFilename, cv2.IMREAD_COLOR)
im1 = cv2.cvtColor(im1, cv2.COLOR_BGR2RGB)
# Read image to be aligned
imFilename = "Quarter_NA4.png"
#imFilename = "Quarter_NA.png"
print("Reading image to align : ", imFilename);
im2 = cv2.imread(imFilename, cv2.IMREAD_COLOR)
im2 = cv2.cvtColor(im2, cv2.COLOR_BGR2RGB)
plt.figure(figsize=[20,10]);
plt.subplot(121); plt.axis('off');plt.imshow(im1);plt.title("Original Form")
plt.subplot(122); plt.axis('off');plt.imshow(im2);plt.title("Scanned Form")
im1Gray = cv2.cvtColor(im1, cv2.COLOR_BGR2GRAY)
im2Gray = cv2.cvtColor(im2, cv2.COLOR_BGR2GRAY)
# Detect ORB features and compute descriptors.
MAX_NUM_FEATURES = 500
orb = cv2.ORB_create(MAX_NUM_FEATURES)
keypoints1, descriptors1 = orb.detectAndCompute(im1Gray, None)
keypoints2, descriptors2 = orb.detectAndCompute(im2Gray, None)
# Display
im1_display = cv2.drawKeypoints(im1,keypoints1,outImage= np.array([]), color = (255,0,0), flags = cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
im2_display = cv2.drawKeypoints(im2,keypoints2,outImage= np.array([]), color = (255,0,0), flags = cv2.DRAW_MATCHES_FLAGS_DRAW_RICH_KEYPOINTS)
plt.figure(figsize=[20,10])
plt.subplot(121); plt.axis('off'); plt.imshow(im1_display); plt.title("Original Form");
plt.subplot(122); plt.axis('off'); plt.imshow(im2_display); plt.title("Scanned Form");
matcher = cv2.DescriptorMatcher_create(cv2.DESCRIPTOR_MATCHER_BRUTEFORCE_HAMMING)
matches = matcher.match(descriptors1, descriptors2, None)
# Sort matches by score
matches.sort(key=lambda x: x.distance, reverse=False)
# Remove not so good matches
numGoodMatches = int(len(matches) * 0.10)
matches = matches[:numGoodMatches]
# Draw top matches
im_matches = cv2.drawMatches(im1, keypoints1, im2, keypoints2, matches, None)
plt.figure(figsize=[40,10])
plt.imshow(im_matches);plt.axis('off');plt.title("Original Form");
# Extract location of good matches
points1 = np.zeros((len(matches), 2), dtype=np.float32)
points2 = np.zeros((len(matches), 2), dtype=np.float32)
for i, match in enumerate(matches):
points1[i, :] = keypoints1[match.queryIdx].pt
points2[i, :] = keypoints2[match.trainIdx].pt
# Find homography
h, mask = cv2.findHomography(points2, points1, cv2.RANSAC)
#Use homography to warp image
height, width, channels = im1.shape
im2_reg = cv2.warpPerspective(im2,h,(width, height))
#Display results
plt.figure(figsize=[20,10])
plt.subplot(121); plt.imshow(im1); plt.axis('off'); plt.title("Original Form")
plt.subplot(122); plt.imshow(im2_reg); plt.axis('off'); plt.title("Scanned Form")
Thanks.
Rob